



DC Model Train Motors
Until recently, I never really paid much attention to the motors used in model trains. They were all the same on any relatively modern model, right? Well, no, actually not. And the differences have an effect on the performance of the model, so they’re worth understanding. It’s also useful to separate out the facts from the hearsay that tends to accumulate on the Internet. I’m going to focus on N-scale motors, since I model in N, but almost all of this information is directly applicable to HO-scale as well. Motors in HO will be larger, and draw more current to pull more weight, but otherwise are built similarly to N-scale motors.
As usual I’ll start with the disclaimer that I am not an electrical engineer, merely an interested hobbyist, so I’m dependent on the writings of others to clarify (or fail to clarify) important points. I’ve done a lot of reading on motor design (both online and in textbooks), and measured many characteristics of motors I happen to have, and I think I understand them. But I’ve thought that a few times in the past and been wrong, so don’t take what’s written here as absolute fact.
This page was updated considerably in early 2014, correcting some earlier mis-statements on my part, and adding a bit of history. At the same time, the detail of actual motors has been relocated (and expanded), and can now be found on the Typical Motors page. As of early 2016, the history material formerly on this page, along with some other material, has been separated into a Brushed DC Motor Technology and History page that describes the evolution of DC motors for model train use in the twentieth century, and some of the details that matter to hobbyists. Information about motor maintenance has been relocated to the Model Train Maintenance page in the Model Trains section.
Motors
An electric motor is a very simple device, particularly in the form found in small model trains. In bulk they are quite cheap. Some inexpensive ones cost US$2 in single-unit quantity from large distributors, although you’ll pay ten times that or more for a motor with a more hobby-specific design and better quality control from a specialist distributor who works with low volumes.
But at the same time it’s an amazing device, converting electrical to mechanical energy with an efficiency approaching that of an electrical transformer. There are many details that can vary from one motor to the next, affecting how they will work in a given application. Over the years, modelers have favored different designs, usually for sound functional reasons, although sometimes that became generalized in ways that didn’t always reflect the reality of available motors.
Distinctions such as three-pole versus five pole armatures, alnico versus ferrite magnets, skewed versus straight armature slots and open-frame versus can motors all have a sound basis, but sometimes matter less than people might think. As in most engineering disciplines, absolutes are hard to come by, and trade-offs more complex than can easily be summarized in a marketing brochure or on the side of a model box.
This page addresses what I feel are the most important issues, at a relatively high level, and while it won’t let you say “this is best”, it will hopefully provide a basis for understanding why one kind is favored over another, and when something that isn’t that favored design may still be a good one. If you want more detail, check out my Brushed DC Motor Technology and History page.
And never forget that a model train motor is part of a system. The best motor in the world will not overcome the limitations of dirty track, a weak or inappropriate power supply, or a gearbox that’s badly-made or improperly lubricated. Careful attention to some basic maintenance will probably make a poorly-operating locomotive work much better than swapping out the motor for a “better” one, although in some cases motor replacement does make sense.
The photo below shows the major characteristics of typical N-scale motors: the open plastic frame (gray), with two bar magnets inside a U-shaped piece of metal (black magnets are top and bottom inside the silver metal) to form the outer North and South magnetic poles, the brushes topped by brass electrical contacts (on right gray section top and bottom), the windings made of layers of stamped metal (center vertically-oriented layers of silver metal) with reddish copper winding wires and the brass flywheels (ends) for added momentum. The only thing you can’t see are the commutators, on the shaft where the brushes touch, inside the gray case at right.
Fllywheels aren’t technically part of the motor. They’re part of the drivetrain attached to the motor shaft, and optional at that. This motor has a big brass flywheel attached at each end, which is fairly common as it puts the most mass possible on the drive shaft, to maintain momentum when power fluctuates.
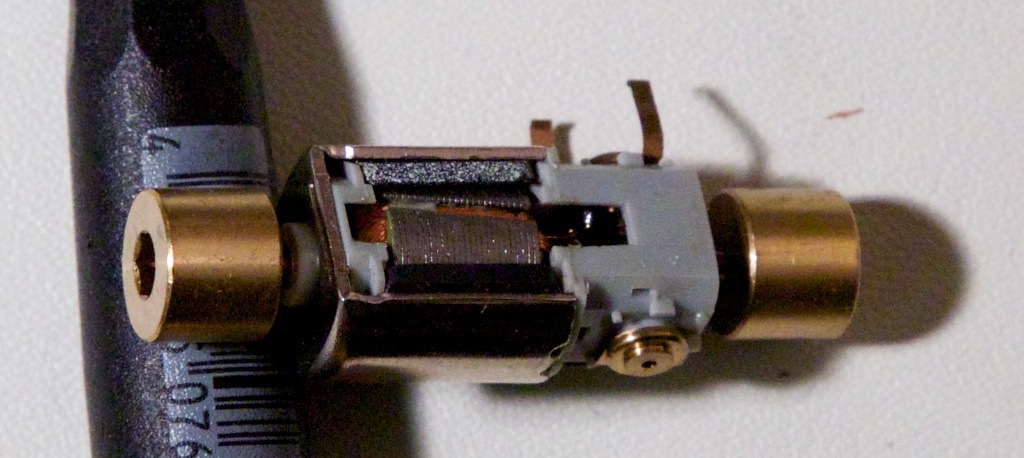
Modern N-Scale open-frame skewed-winding motor with twin flywheels mounted on the motor shaft (from an Atlas model)
Types of Motors
Most motors used in model trains today are brushed DC permanent magnet motors. These operate at maximum speeds around 10,000 rpm (some can operate at higher speeds) using gear trains to reduce the speed at which the wheels turn, and thus can be rather noisy. Older ones were also rather poor at low-speed performance, but this has been improved significantly with newer designs. The brushed DC permanent-magnet motor is a design that hasn’t changed much since the nineteenth century, and all of the characteristics of motors we use today (e.g., typical maximum speed, armature design options, nominal 12V power) were in use within the model railroading hobby by 1946.
That’s not to say that all motors are identical, nor would we want them to be. Motors with different features can be optimized for specific kinds of use, or for use with specific drivetrains. At the same time, much of what can be changed with a different motor design can also be changed by modifications to the drivetrain, so many trains do use very similar if not quite identical motors.
There is considerable variation in motor speed and torque, for example, and in the gears used to convert that to turning the wheels can be varied to compensate or emphasize speed or pulling-power. A motor that makes one train run much faster than prototypical speed at full voltage could make another into a slow and powerful switching engine. Similarly, the brushed DC permanent-magnet motor has slight variations in power (torque) as the shaft turns, and these can be compensated for though motor design or heavy flywheels (or both).
Motor technology has also evolved over the years, with modern motors producing the same power in a smaller form than older ones due to improvements in materials, magnet technology, and manufacturing.
One more thing that has changed has been our understanding within the model railroading hobby of how motor designs affect performance characteristics we care about, like low-speed running and pulling power. Evolving control systems, from early battery and rheostat designs, to more complex transistor-based systems, to present-day microprocessor systems (for both DC and DCC use) have also influenced how we used motors and what aspects mattered, although this hasn’t always been clear to individual hobbyists, who have to depend on the model companies to understand what we’re doing and produce what we need. This has been aided from time to time by modelers who are also skilled in the areas of technology relevant to concerns of the day. But why we choose what we choose is often reduced to generalities so vague that it can be hard to tell what is still relevant, and what was a choice based on the limits of a technology no longer in use.
Important Characteristics of Motors
Motors have two related attributes: speed and torque. The power of a motor (ability to do work) derives from the torque and the speed. For a more in-depth discussion of this, see the Brushed DC Motor Technology and History page.
Speed is directly proportional to voltage: at maximum voltage the motor turns at the maximum speed for a given load. Thus a motor rated for 16V use will turn slower at 12 volts. Speed is measured in revolutions per minute (RPM), and for the kind of motors we care about is typically around 12,000 RPM at maximum voltage with nothing attached to the motor (this varies).
Motor speed is reduced in the gears of the drivetrain, so that the wheels on the locomotive turn much more slowly, but locomotive speed is directly proportional to motor speed for a given set of gears. This is an effect of the gear ratio. Gear ratios vary a low. Steam engines have large wheels, and so need a higher ratio to reduce the speed more, typically around 30:1 or even higher for a freight locomotive, although actual models vary widely. Passenger steam locomotives typically ran at higher speeds and pulled less weight, and models often reflect that with lower-ratio gears (down to around 15:1, but more commonly somewhat higher). Diesels and electric locomotives have small driving wheels, and so need less of a reduction, and thus a smaller ratio. A number of my models use 12:1 gearing.
A ratio of 12:1 means that the wheel axle will turn once for every twelve turns of the motor shaft, and if the motor is running at 12,000 RPM, the wheels are turning at 1,000 RPM. If you reduce motor speed to 6,000 RPM (half speed), the wheels would then be turning at 500 RPM (also half speed). I have a model with that gearing that uses 5.55 mm diameter wheels with a motor that runs at 14,000 RPM (unloaded) on 12V. At top speed the wheels turn at about 1,200 RPM, producing a scale speed of 195 kph (121 mph) in 1:160 scale. That’s a bit fast for a freight, but suitable for a fast passenger train (not “high-speed rail” fast, but ordinary fast). To crawl along at 3 kph (5 mph) the wheels need to be turning at about 360 RPM, about 2.6% of top speed. That’s possible with a modern motor, and a tribute to how well these are engineered.
Motor speed, while dependent on voltage, is also affected by load. The maximum speed is for an unloaded motor. As the motor has more load, it turns slower for the same voltage. The word “load” refers to any force that the motor has to overcome, generally various types of friction. Friction comes from the elements of the drivetrain (which is why good lubrication of the gears matters) and from the friction in the wheel of pulled cars, caused by the number of wheels, the kind of axle bearings, and the weight of the cars sitting on those wheels, which is why making sure that car wheels are free-rolling and not binding is important. It’s also why cars should not exceed the NMRA recommended weight-per-car, because more weight makes for more friction (less-than-recommended weight would be better for getting cars moving, but then they’re more likely to derail for other reasons).
Torque is the ability to overcome friction, and it varies as the inverse of speed. At maximum speed, the torque is zero. At zero speed, torque is maximum. Think of it this way: the voltage can either produce speed or torque, as you increase one, the other decreases. More power is needed to start a stopped train than to keep it moving, so if a train has enough power to move at all, it can generally move a bit faster than “dead slow”.
Current is also important to consider, but this is complicated by the fact that a motor in motion produces “back EMF” based on its speed (back-emf is used by some DCC decoders as a way to measure motor speed and compensate for speed reductions due to load). Back-EMF is effectively subtracted from the needed current. You need more current to bring a motor up to speed, but once there less current is needed to keep it there. However, the more load that is placed on the motor, the more current that is needed. Ultimately it’s the current that’s being turned into pulling power. If you need to pull more weight, you’ll use more power. This is why “stall current”, the amount of current consumed by a motor when you keep the shaft from turning and apply full voltage, is the maximum current a motor can draw, because the motor is doing all that it can to oppose a force greater than it can overcome.
Stall current matters in DCC decoders (and other kinds of motor-driving circuits) because if a decoder can’t handle a motor’s stall current, the decoder will “burn out” if the motor becomes stalled. Since it’s fairly easy to stall a model train motor if you add too many cars or leave a bit of scenery blocking the tracks, this will happen sooner or later.
Problems with Brushed DC Permanent-Magnet Motors
The brushed DC permanent-magnet motor is a very good design for small motors, but it is not without problems.
Because there are only two external magnetic poles (something a “wound field” motor can avoid) there is more variation of torque over the course of a motor rotation than on some other designs. Some features, liked skewed windings or additional slots (“poles”), can help reduce this. Adding flywheels external to the motor also helps, since these store momentum (more useful at higher speeds though).
Historically, there was a problem where permanent magnets could lose strength over time, reducing the torque produced by the motor. This was more of an issue in older motors that used “Alnico” magnets. Modern ferrite and rare-earth magnets are much less prone to this problem. While this is unlikely to happen to a modern motor, the cause of this was rapidly reversing the magnetic field in the motor, i.e., by slamming the train into reverse without first reducing the throttle. Operating a train in a prototypical manner (i.e., stopping before reversing) removes any risk of this problem. Very old motors might suffer from this, and while it’s possible to remagnetize an alnico magnet, it’s probably simpler to replace it with a modern one that is stronger in the first place, and won’t lose power in the same way (for more about this, see the Repowering section below).
Other Types of Motor
Brushed DC motors don’t have to use permanent magnets on the outside. Windings can also be used to create a stationary magnetic field that serves the same function. This is mostly of use in larger motors, where stronger fields are needed and the cost of permanent magnets would be high. Such motors, described as “wound field” brushed DC motors, were used in the early days of model railroading and some may still be used in larger scales. With wound fields, the magnetic field can also be structured to have more than just two poles, and when a motor manufacturer refers to a motor having “poles”, it’s normally these stationary poles that are meant, unlike hobbyists who use the term for the number of slots on the armature (and the shifting set of poles created by them).
So-called “coreless” motors, which use windings without the metal armature, have been used in some trains. These have a tendency to overheat if stalled (which can cause them to self-destruct; without a metal core to carry heat away, rotation of the armature is essential to cooling at higher currents). Coreless designs are typical of very small motors (the “pager motors” reported to be used in Kato’s Unitram may well be a coreless design), although they are sometimes used in larger scales as well. Coreless motors are said to be better for model train use (more efficient), but I haven’t found an authoritative source for that. They do have less of a cogging effect, which likely improves their slow-speed operation. They also react more quickly to changes in voltage due to the lack of mass in the armature (no metal core); but in model trains this is probably a negative feature, as it means the motor slows down more quickly due to power pick-up problems.
Coreless motors should not be used with non-ultrasonic DCC decoders or other low-frequency digital motor controllers, such as the PWM normally produced by an Arduino, as this could seriously damage the motor (again, due to overheating; there is more hysteresis loss with low-speed pulsing to heat the motor, and less cooling if it is not rotating quickly). Even many “ultrasonic” decoders have output frequencies around 16 kHz, and motor manufacturers typically recommend frequencies above 20 kHz for coreless motors. It’s best to use a decoder specifically rated by the manufacturer for such motors. Coreless motors are more common in Europe than North America, so European decoder manufacturers such as ESU (LokSound) and Zimo are good choices. Motors with steel cores (the typical kind of motor) are more tolerant of lower-frequency PWM, but they still benefit from the use of higher frequencies.
PWM is used not only by DCC, but by other digital motor controllers, such as those used with Arduinos and similar hobbyist electronics. It may also be used by more advanced DC throttles, although I haven’t run across any that use it. Pulsed power, used on some DC throttles, works similarly and has the same kind of heating issues at low speeds (see the DC Train Control page for more about pulsed power).
Another design is the “brushless” motor. These put the permanent magnet on the armature, and the windings on the outside. Because they don’t use brushes or a commutator they aren’t as prone to wear out (no arcing on the brushes under load also means less heat). However, they require some control system to switch the power as the motor rotates, which typically makes them more complex. Such motors have apparently been used only as replacement motors and not original equipment. These require a specialized control system (there are DCC decoders that provide this) so they aren’t just drop-in replacements.
Even among conventional brushed DC permanent magnet motors, which the rest of this page will cover, and limiting discussion to the types typically used in the hobby, there is substantial variation of design. Understanding what these features are and why they may or may not matter is useful when reading manufacturer descriptions of models. Just keep in mind that quality has more to do with the attention paid to detail by the designer and builder of the model and its motor than any feature such a motor may claim. A poor quality motor with every feature anyone could ask for still isn’t likely to run well, or continue running well.
Old Motors, New Motors, and Repowering
Motor technology has changed in many substantial ways over the last 80+ years, even though the basic aspects of design were well-known by 1946. The motor in any good model train today is likely substantially better, in many different ways, than one bought thirty or more years ago. A cheap model bought today probably has a cheap motor and a cheap drivetrain, and may be worse than those older models. But given the relative costs, buying a cheap model and adding a better motor and upgrading the gears probably doesn’t make a whole lot of sense compared to just buying a new model with higher-quality paint and detailing, plus a modern motor and drivetrain.
It’s a different story if you’re buying (or have) an older model because it’s the only way to get what you want, but would still like it to run as much like a modern one as possible. Here, cost may be a secondary concern. However I’ll note that I’ve been unable to find the equivalent of the open-frame motors used in modern N-scale models sold separately (except from Kato as noted below). Remotoring an older N-scale model probably involves using small can motors, which aren’t necessarily any worse than the current open-frame designs, but it’s hard to find them as small as the 9mm x 13mm x 24mm size used in some modern N-scale models.
If you want to go this route, NorthWest Short Line sells a line of small can motors for HO scale and larger, although their smallest motors (at 10mm x 12mm x 15mm to 10mm x 12mm x 25mm) may be usable in an N-scale locomotive depending on the design. Kato USA sells motors (in their online parts catalog) for their GG1/MP3H, but not other models (others may be available if requested), and Kato Japan sells replacement motors for many Japanese designs, but only though dealers and availability seems to be erratic (I’ve never tried to buy one though). Typical costs are around US$30.
Modelers with really old open-frame motors from the 1960’s have yet another option: magnet replacement. As described on this site, it’s possible to replace Alnico magnets in these older models with rare-earth Neodymium magnets. This will increase torque, at a cost in decreased top speed and increased power requirements (and these old motors often needed around two amps, so you need a good power pack or a really hefty DCC decoder to do this). You can’t really do the same thing with a can motor or a modern open-frame design, because the magnet is shaped to fit the can (or “yoke” in an open motor) and the armature, rather than being rectangular.
Motor Design and PWM Pulse Frequency
Although not normally an issue in “DC” control systems, DCC decoders use high-frequency Pulse-Width Modulation (PWM) to drive motors. Motors are electrically a “Series RL Circuit”, meaning that they can be described as a combination of an inductor and resistor in series. One effect of this is that current though the motor lags the application of voltage to the motor by a time defined by the “time constant”. Since applying voltage is what the start of a pulse does, and current is what makes the motor do work, there’s an obvious need for the pulse to stay on long enough to drive the motor’s current up to full value and keep it there for a time. This is mainly an issue at lower speeds, as this is when pulses will be the shortest.
The underlying behavior is “exponential” in nature, so it’s not a simple “after X microseconds full current is reached” behavior. Instead, after a time T equal to the “time constant” (which is around 100 microseconds for a typical motor) current will be at 63.2% of that predicted by Ohms law for a simple resistor of the same value. After 2T (200 usec in this example) it’s at 86.5% and at 5T it’s at 99.3% of full current (this is typically the time given for full current, even though it isn’t quite full).
But “full current” isn’t all that interesting, because we’re not concerned with driving the motor at the stall current (which is what “full” means). We’re concerned about driving the motor at some relatively small fraction of stall current (typically less than half, maybe as low as one-third). It turns out to take about 0.4T to reach one-third the stall current.
So for typical low-speed running even a delay of T (which equates to a frequency of 8 to 12 kHz for most motors) produces something close to the full current we’d have at that level of voltage. I get into the details of this on my PWM page, and describe T (which I call the “minimum DCC frequency”) for a number of motors I’ve measured on my Typical Motors page.
If the motor never gets to full current, it never produces full back-emf (which reduces the effective current) and thus average current (and heat) is higher for the same amount of power. This can lead to overheating with sustained low speeds, which isn’t good.
The bottom line is that supersonic decoders (typically operating at 15 kHz or higher) are good for motors. You may lose some torque (maximum speed or pulling power) from this compared to a non-supersonic decoder, but that’s probably a price worth paying if you care about the longevity of your models.
Break-In and Operating Considerations
One contentious topic is the subject of “breaking in” a new model. Most modelers will regard this as necessary practice, myself included. Some are adamantly against the idea, for reasons varying from “it does nothing” to “it can damage the model to run it for an extended time”. Even assuming it does provide a benefit, exactly how it does so is a topic of further uncertainty. You could, of course, just wait for your first operating session to break the model in. But wouldn’t you rather have the model running smoothly when you’re actually using it? I would, and I think a small amount of break-in is beneficial.
There are many things that breaking in a new locomotive could affect. The things I’ve seen suggested are: wearing down the brushes to match the curve of the commutator, polishing and lubricating the commutator from the action of the brushes rubbing on it, smoothing rough edges off plastic gears and gear bearings, and distributing factory-applied lubricant though the gear train and/or motor bearings. Perhaps all of these have some effect, although brushes wear quite slowly, so ten minutes isn’t going to do much there.
One note: NorthWest Short Line (NWSL), a reseller of motors and associated parts for model trains, notes in their catalog that “breaking in” gears isn’t required for good gear systems. I think that’s correct, but I’ll note that the other reasons (distributing lubricant, creating some initial wear-in on brushes) are probably still true. In any case, my experience is the new locomotives run better after less than a half-hour of break-in than the do “out of the box”. I’ll note that NWSL doesn’t sell replacement motors suitable for my usual Kato or Tomix models, so I haven’t done much business with them. They do have a reputation for knowing what they’re talking about.
My usual break-in method is to run a locomotive or motor car around a circular track on my layout in one direction at a medium speed setting (not the slowest it will go, but not too fast) for 15-30 minutes, then run it the other direction for a similar time (mainly to ensure any wear is evenly distributed). Most of the benefit is apparent in the first ten minutes. I’ve tried running for an hour in each direction, but I haven’t seen any noticeable advantage from that. This also has the benefit of immediately highlighting any operational problems on a new model, such as a truck that isn’t quite seated; I’ve had new models derail on a switch due to truck problems.
A good, modern model shouldn’t take any harm from extended operation on DC, as long as you aren’t overloading it by pulling a very long train or with the throttle cranked up to maximum or running it all weekend at a train show. I’ve run trains for a couple of hours continuously with no obvious trouble, although there is undoubtedly a cumulative effect. Eventually the lubricant will get dirty and it will be a good idea to clean and re-lube the mechanism to minimize wear. But I’d expect that to come from tens of hours of operation, not a couple. Motor brushes will wear down over time, but modern ones should be very long-lived if treated well.
A DC motor will wear out, but it takes hundreds of hours of operation to do so. Brush wear is the most common problem (after lubrication needing to be renewed) and you can buy replacement brushes for some motors (Kato sells them for theirs). The permanent magnet can also lose it’s magnetic field over time, although that’s less of an issue with modern ones. When that happens, you probably need a new motor, although it might be possible to get a replacement magnet. It used to be possible to “remagnetize” a motor, but I’m not aware of anyone offering that service today, in part because it’s much harder to do for modern high-strength magnets.
One comment on motor wear: brushes and commutators wear more as current increases, and current increases with load. Heat in the motor can also be an issue at higher average voltages. One manufacturer of small DC motors (MicroMo) recommends operating motors at half the maximum “stall torque” or less to avoid excess wear. That means that if your locomotive can pull 50 cars maximum at full throttle, keep your normal train size under 25 cars or double-head (use two locomotives of similar design on the train). Speed isn’t really a factor here: an unloaded loco at full speed is drawing very little current, thanks to the effect of Back EMF. I’ve seen other recommendations to run at one-third the stall current or less, but the basic guidance is the same: work the motor as hard as you can and it will wear out a lot faster than if you work it more gently.
Voltage and the form of voltage also matters. Running an N-scale model designed for 12 volts on a 20+ volt system (as some HO systems are) isn’t doing the motor any favors. Likewise, using a thirty-year-old power pack with a “pulse” switch may be doing things to the motor that really aren’t good for it, as older systems often used a half-wave pulse that produces more heating.
Voltage and Current
Motors have a maximum voltage rating, although this isn’t normally published for model train original motors. Instead you’ll often see a nominal voltage limit (like “12V” for N scale) mentioned, but the motor is probably safe to operate at slightly higher voltages. Fundamentally, the limit is based on the motor’s ability to withstand the current flowing in it, and to dissipate the heat produced from that current and mechanical friction within the motor.
The maximum current a motor will draw for a given voltage is relatively easy to determine, but it does vary with voltage. Note that this won’t tell you what current will harm the motor. However, a good rule of thumb to use is that at the rated voltage for the motor, the maximum continuous current should not exceed one-third to one-half the maximum possible current. In other words, for a 12 Volt motor, measure stall current at 12 volts, and keep operating current (which will vary with load and speed) below half of that regardless of what voltage you run the train with.
The maximum current drawn at a given voltage is the stall current for that voltage, the current drawn when the armature is not turning (is “stalled”). This term is familiar to anyone who’s converted a motor to DCC use, but it is equally applicable to DC power. The stall current will be drawn when the motor is just starting, but only for a very brief time. It will be drawn for an extended time if something causes the mechanism to jam so that the motor isn’t turning. A train pulling a very heavy load could approach stall current, and if it were to stall out on a grade at full throttle without spinning its wheels, it would be drawing the stall current.
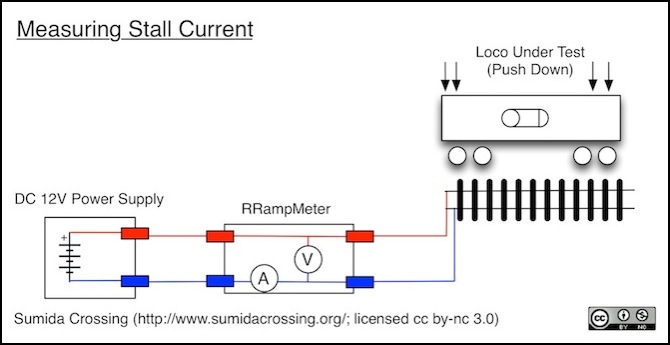
Stall current can be measured by putting a loco on a piece of track, wiring up a DC power supply at a known voltage which is capable of producing the necessary current, with an ammeter in series with one of the wires from the rail to the power supply (an RRampMeter is good for this, as it will give current and voltage) and pressing the loco down firmly so the wheels can’t move, before turning on the power. The Amps reported on the meter are the stall current at that voltage. To get the stall current at another voltage, divide the measured current by the measured voltage, then multiply by the desired voltage. For example, to convert a motor measured at 12V to the stall current at 18V (a reasonable “worst case” DCC environment): 500 mA at 12 V would be (500 / 12) x 18 = 750 mA stall current at 18 volts.
Note: if using an RRampMeter without an internal battery, voltage must be at the right polarity and higher than 7 volts for anything to display on the meter.
If you are measuring stall current for a DCC conversion, keep the “depends on voltage” aspect in mind. If your DCC system uses a Zephyr (14 Volt DCC), it’s stall current at 14V that matters. If you plan to run the model on a friend’s or club layout with 18V DCC, it’s the stall current at 18V that matters. Measuring stall current at 12V would cause you to undersize the decoder for both of these situations, and could result in a blown decoder.
For the best accuracy, do the following:
- measure when the windings are cool (i.e., the motor has not been in use), as resistance changes with temperature can be quite large, and will produce misleading results.
- measure multiple times with the motor turned slightly between measurements and average the results (stall current can vary depending on the position of the windings).
On a DC layout, the voltage experienced by the motor depends on what the throttle is set to. If you are concerned that your pack puts out 18V, but the motor might be limited to 12V, you can hook up a voltmeter and not turn the pack up beyond 12V. However, this can be harder to do with more sophisticated packs which use pulsed power, as this can trick voltmeters into misreading. Likely what shows on the meter when set to DC will be higher than what’s actually on the track, so staying below your “safe” voltage will still be safe.
On a DCC layout, the voltage depends on the voltage of the DCC command station or booster and the “duty cycle” of the PWM output. At 100% throttle the motor will experience the full voltage. If you are concerned about limiting the voltage, you could use a speed table in the decoder. E.g., 12V is 60% of 20V, so if you wanted to limit to 12V on a 20V system, you could write a speed table with a maximum value of 153 (60% of 255). However, you’d need to turn off BEMF or other features that could raise the motor power even if you didn’t raise the throttle value.
Even so, using a DCC system with a high track voltage produces a high peak voltage, and although average voltage matters for speed, peak voltage will affect heating of the motor (due to hysteresis loss in the pulse, not due to resistive heating which depends on the average voltage). Thus DCC systems with high track voltages aren’t good for lower-rated motors, no matter what you do with the power.
Ideally, you should avoid these problems by choosing a power supply suited to your scale. For N-scale, that’s ideally something under 14 volts, for HO it’s ideally something under 18 volts. But in both cases there is often a large safety margin, so it may be possible to use higher voltage supplies at a relatively minor cost in longevity of motors. But at some point, higher voltage will start to cause more serious wear on the motor. Best to plan ahead and avoid that by selecting an appropriate power supply.
References:
Basic Motor Theory - a fairly detailed description of the principles of operation of electric motors.
Brushed DC Motors - a motor manufacturer’s product overview (note the lack of mention of “poles”).
DC Motors: Principles of Operation - a very clear description of how the magnetic fields interact.
DC Motor Application Considerations, a tutorial by MicroMo.
Development of Electromotive Force, a tutorial by MicroMo.
Mabuchi Motor page on their Motor Designations and their Meanings, which includes information on number of poles. This website also has additional technical info about DC motors. (link thanks to a reader reference; thanks Victor).
Magnet Guide and Tutorial (PDF), Alliance, LLC.
Model Railroader Magazine 75th anniversary DVD back issue collection (issues cited in the text).
Modern Permanent Magnets for Applications in Electro-Technology, by Karl J. Strnat. Proceedings of the IEEE, Volume 78, Number 6, June 1990
Permanent Magnet Motor Technology, Third Edition, by Jacek F. Gieras, CRC Press.
The Simple DC Motor: A Teachers Guide, Kristy Beauvais - not the clearest explanation of principles, but a great “build it yourself” tutorial on making a very simple motor out of a loop of wire.
How Stuff Works: Electric Motors - a nice, if simplistic, explanation of brushed DC motor operation.
Model Railroad Technical Information - a site with lots of info, some of it about replacing model motors. The “remotoring” page in particular has a lot of detail about motor types.
Motors and Gearboxes, Uses and Notes, posting by bertiedog (Stephen).
Replacing Marklin Z-scale 3-pole Motors with 5-pole Motors - very specific, but some general info
