



DC Motors, Poles, and Skewed Windings, Oh My!
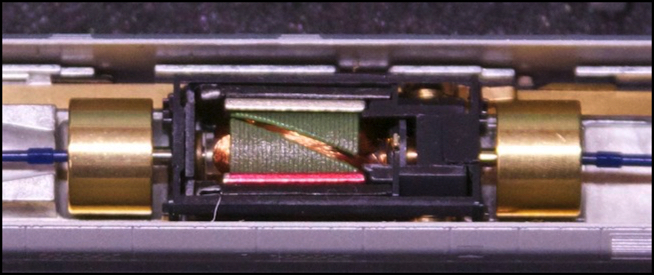
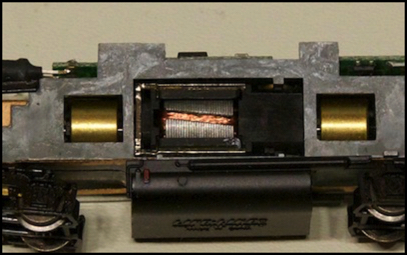
So, what is a “5 pole” motor, and why should I care if my models have one? And do they? That question occurred to me a few weeks back, and I’ve been doing a bit of reading since then. What I discovered was a mixture of fact and Internet lore of uncertain origin. I also discovered that some models do have “5 pole” motors, while others have “3 pole” ones. But oddly, at least in the case of Kato (and possibly also Micro Ace), the “3 pole” motors are the better ones. Or at least the newer ones, although I think they’re better too. The photo above is of one of them, in my E3 Komachi Shinkansen (10-221).
What is this “5-Pole” Stuff Anyway?
Well, that’s the question. The way the term is used by hobbyists it refers, I believe, to the number of exposed armature faces (the dark gray metal parts in the photo above) around which the copper wire “windings” are wound (and thus it also refers to the number of separate sets of windings). A brushed DC permanent-magnet motor will typically have three or five of these (sometimes seven). But while these do provide “magnetic poles” when in use, nobody outside the hobby and its supporting industry uses “pole” to refer to the count of potential magnetic pole locations on the rotor (the moving part of the motor). The term is only applied to the fixed poles on the “stator” (the stationary frame around the rotor). And you won’t find the word at all on spec sheets for small DC permanent-magnet motors (or at least I haven’t yet). It’s mainly used in large electric motors that may have four or more electromagnetically-generated fixed poles. Misuse or not, “pole” is an accepted term within the hobby for the rotor lobes, and I’ll use it for the sake of clarity since I’m writing for hobbyists and not electrical engineers.
Now all things being equal, a five-pole motor will have better low-speed performance (smoother running) than a three-pole one, at a cost in reduced torque (which can affect starting speed and pulling power). Skewing the “pole” (as in the photo at the top of the page) can also provide a similar benefit, as it also reduces “cogging torque”, the tendency of the motor to want to stop at each gap between poles. While extra poles are beneficial, there’s also a limit as more poles mean more wasted space between them. This generally limits the choices in small motors to three or five (it has to be an odd number).
In HO scale, five-pole, skewed-armature motors have been available for years, and they do exist for N-Scale also. But in N-scale, Kato appears to choose between either having five poles or a skewed armature, but not both. That’s likely due to the small size of these motors and the torque lost with more or skewed poles. With both, perhaps the motors just don’t have sufficient power. In their newest Japanese models, both Kato and Micro Ace appear to have chosen 3-pole skewed-armature motors over 5-pole non-skewed ones. This could be a cost issue, although it seems unlikely. Or it could be that there is an improvement in performance from the skewed armature that makes it preferable.
What Kind Do They Use?
When I discovered the three-pole motor in my Shinkansen, I assumed it was an older design due to the set’s 200-series model number. So I started taking apart my trains. What I discovered was that there was no correlation between the model number and the age of the design. All models designated “DCC Friendly” have motors near-identical to the one above, with three poles, skewed armatures, and flywheels. And all EMU models that aren’t designated “DCC Friendly” use a motor that has five “poles” but straight, rather than skewed, armatures (they also lack flywheels).
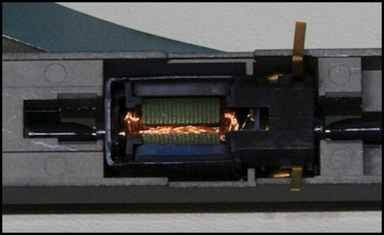
Kato Pre-“DCC Friendly” 5-pole, straight-armature motor (without flywheels)
Kato has been using the 5-pole motor at least since 2003 (the oldest Kato model I have), and appears to have introduced the 3-pole skewed motor in 2007 along with the “DCC Friendly” design. But they’re still making new models based on the older designs (e.g., my Nikkō/Kinugawa 485, set 10-918, which came out in 2010), and those new but not “DCC Friendly” models still use the 5-pole straight-armature motor.
Kato uses the three-pole skewed-armature design on their DE10 locomotive (the only one of my Japanese locomotives I’ve had apart so far), which is another point to suggest that this is their preferred design now.
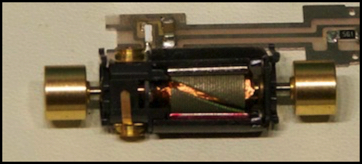
Kato DE10 3-pole, skewed-armature motor (with flywheels)
However, a couple of recent North American Kato N-scale locomotives I own (a GG1 and an SD80MAC) both have the 5-pole motor (albeit with flywheels). This may be a case where the market’s insistence on “5-pole” designs actually prevents North American hobbyists from getting better motors. It’s possible that there’s less pulling power in a skewed armature than in a five-pole design, and the large layouts typical of the North American market do cause us to value pulling power, whereas the small layouts of Japanese hobbyists probably place more emphasis on precision slow-speed operation than raw power. At least for now, it’s anyone’s guess why these differences exist.
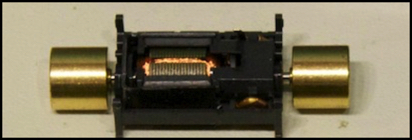
Kato SD80 MAC 5-pole, straight-armature motor (with flywheels)
All of Kato’s motors, both Japanese and for the North American market are very similar except for the windings on the rotor. They’re all “open frame” designs using a plastic frame (which is helpful for electrical isolation in locomotives using split-frame designs, and probably also to customize for individual model requirements). Actually, Micro Ace and Walthers also use similar motors.
It’s Not Just Kato
I don’t have any Tomix EMUs, but I do have a number of Micro Ace ones. So far I’ve only taken apart the Sōbu E231 I mentioned last week, as I want to see if I can make it run better. What I found is that it too has a three-pole skewed armature design, although the degree of skewing is less. As this train is new for 2010, I’ll presume for now this represents Micro Ace’s most recent motor design, although it could always be based on an older car design.

Micro Ace EMU 3-pole lightly-skewed armature motor (with flywheels)
Walthers actually uses a very similar motor with a 5-pole skewed armature in their “Proto N” line of locomotives. So it is possible to have both five poles and a skewed armature in an N-scale locomotive.
Walthers Life-Like “Proto N” GP38-2 with 5-pole, skewed armature motor
All of these motor photos are available in the Train Parts photo album, where they can be viewed in larger sizes.
Summary
So I’m left wondering if the 3-pole skewed motor is really superior to the older 5-pole straight design, and how both compare to the Walthers design. Subjectively, the “DCC Friendly” trains seem to have better low-speed operation than the older ones, but since the older ones lack flywheels, which help compensate for dirty track and other power irregularities, there’s no guarantee that any perceived difference is down to the motor design. It is interesting to discover that Kato doesn’t have flywheels on any of the pre-2007 trains (or any later trains using those designs).
I’m going to have to take apart more trains, particularly all of my Micro Ace ones, and my other Japanese locomotives to see what they have in them. I’m also thinking about perhaps doing some more formal performance comparison, although I expect that will wait until next year.
Other website changes:
- I added a Train Parts photo album, so I’d have a place for all these motor photos and similar things that weren’t running trains or layout electronics
- I’ve also updated the Train Photos album with photos of my new Hokutosei passenger train.
- I’ve updated the Roster and Reservations pages to reflect the Hokutosei, and also added a line for motor type to the roster entries. And I added a Recent Arrivals page to track new trains.
- I created a page to store information about motor types and the principles of their operation.
- I created a page for information about how to take apart model trains (so far mainly about the two types of Kato EMU motor cars).
- I’ve done a bit more work on my Freight Cars page, but not much.
- I’ve updated the More Links page (mostly with additional online stores).
== Comments copied from old system:
Tuesday, December 14, 2010 - 12:40 AM
quinntopia
That was really interesting. I really learned a lot. Thanks for taking the time to put this all together! Like you, I never really understood the whole 5 pole issue, but just assumed it was better! Now I know a little better! Now, I'm curious...what sort of motors do you think were used in the early days of N Scale? I'm thinking the 1970's Bachmann's, LIma's and other beasts that made more noise than any DCC sound system could!
Tuesday, December 14, 2010 - 02:58 AM
KenS
A good question, but not one I know the answer to. I didn't get into N-scale until a few years ago, and back when I did HO I wasn't paying attention to motor design.
By all accounts I've read, N-scale of that era was pretty crude, as the technology to mass-produce precision models consistently was much worse that it is today. While five-pole motors were around in HO going back to the 70s (at least), I think they became more widespread in the 80s. It's likely that N-scale lagged that, and motors of the 70s were probably simple three-pole designs. But I don't know.
BTW, I've updated the "motor types and principles" page, as I'd learned a few things while finishing up last nights post that hadn't got back into it. Mostly I think I said some wrong things about torque, which have been fixed.
